|
-
|
Dem Dash Board (Cockpit) unterliegt nicht nur die Aufgaben die spezifischen, für den Fahrer nützlichen Informationen zur Anzeige zu bringen, sondern ist auch mit den Sensoren und Stellantrieben des Motorrads verbunden. Übernimmt die von den Ersten gelieferten Informationen ins Netz und steuert die Zweiten, dies auch in Abhängigkeit der von den an das Netz geschlossenen Rechnern empfangenen Befehlen. Auf seinem Servicedisplay wird darüber hinaus auch auf Funktionsstörungen des elektronischen Fahrzeugsystems hingewiesen.
|
|
-
|
Das Hands Free ermöglicht den Motorstart, ohne die Erfordernis dazu den klassischen Zündschlüssel in den Zündschlüsselblock einstecken zu müssen. Der Motorstart wird damit erleichtert und erfolgt schneller. Dieses System gewährleistet auch einen höheren Schutz vor Diebstählen.
|
|
-
|
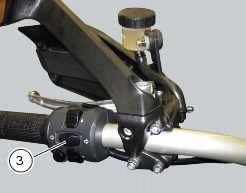
Das ECU ist für das Management der Motorfunktionen zuständig und hält auch das „Ride by wire” unter Kontrolle. Diese Vorrichtung moduliert die Drosselklappenbewegung über einen elektrischen Stellantrieb, der wiederum über das Steuergerät entsprechend koordiniert wird. Das Steuergerät empfängt das Signal des „Abrufs des Drehmoments” über das Potentiometer, das mit dem Gasdrehgriff verbunden ist. In der ECU sind unterschiedliche Programmierungen für die Drosselklappenöffnung abgelegt, die den Erhalt unterschiedlicher Höchstleistungen und unterschiedlicher Drehmomentkurven in Abhängigkeit der Motordrehzahl ermöglichen.
|
|
-
|
Die Electronic Suspension ermöglicht eine Einstellung der Radfederungen über elektrischen Stellantriebe, ohne dazu auf die klassischen Einstellschrauben einwirken zu müssen. Die Einstellung erfolgt „passiv” und ändert sich daher nicht automatisch während sich das Fahrzeug in Bewegung befindet.
|
|
-
|
Das BBS ebenso wie das Dash Board ist mit den Sensoren und Stellantrieben des Fahrzeugs verbunden. Übernimmt die von den ersten gelieferten Informationen ins Netz und steuert die zweiten, dies auch in Abhängigkeit der von den an das Netz geschlossenen Rechnern empfangenen Befehlen. Ihm unterliegt darüber hinaus eine wesentliche Funktion bzw. es „sammelt” alle von den einzelnen Rechnern registrierten Fehler, die sich auf spezifische Betriebsstörungen beziehen. Die im BBS enthaltene Software über nimmt auch die Funktion der DTC, über die die Motorleistungsabgabe kontrolliert wird, um das Durchdrehen des Antriebrads bei Beschleunigung zu vermeiden. Im Fall eines Austauschs des BBS müssen, falls das jeweilige Motorrad über ein elektronisch einstellbares Fahrwerk und beheizte Lenkergriffe verfügt, das BBS selbst mit der integrierten DDS neu initialisiert werden.
|
|
-
|
Das ABS verhindert das Blockieren der Räder bei Notbremsungen. Die Diagnose bezüglich seiner Funktionsstörung erfolgt in einer von den anderen Systemen unabhängigen Weise, d.h. das Steuergerät des ABS verfügt über einen eigenen Diagnoseanschluss, an den das DDS dazu angeschlossen werden muss.
|
|
-
|
Das Verteilersystem des Fahrzeugs erfordert weniger Sensoren und vereinfacht damit erheblich den Aufbau des elektrischen Systems (die von einigen Sensoren gelieferten Informationen können geteilt werden und daher müssen diese Sensoren nicht mehrfach, für jeden einzelnen Rechner dupliziert werden).
|
|
-
|
Jeder Rechner kann komplexe Steuer-/Kontrollfunktionen übernehmen, was auch dank der Informationen möglich ist, die er von den anderen im Netz verschalteten Rechnern empfängt.
|
|
-
|
|
-
|
DEVICE ECU Der ECU-Knoten (Motorsteuergerät) wird vom Netz nicht erfasst oder steht nicht mit ihm in Kommunikation. Das DDS kann folgende Hinweise zur „ECU working diagnosis” anzeigen: ECU counter, ECU no frame, ECU not compatible
|
|
-
|
DEVICE Dashbord Der Dash Board-Knoten (Cockpit) wird vom Netz nicht erfasst oder steht nicht mit ihm in Kommunikation. Das DDS kann folgende Hinweise zur „Dashboard working diagnosis” anzeigen: Dashboard counter, Dashboard no frame, Dashboard not compatible
|
|
-
|
DEVICE Hands free Der Hands Free-Knoten (unterstütztes Startsystem ohne Schlüssel) wird vom Netz nicht erfasst oder steht nicht mit ihm in Kommunikation. Das DDS kann folgende Hinweise zur „Hands free working diagnosis” anzeigen: Hand free counter, Hands free no frame, Hands free not compatible
|
|
-
|
DEVICE DES Electronic Suspension (elektronisch „passiv” einstellbares Fahrwerk ) wird vom Netz nicht erfasst oder steht nicht mit ihm in Kommunikation. Das DDS kann folgende Hinweise zur „Suspension working diagnosis” anzeigen: Suspension counter, Suspension no frame, Suspension not compatible
|
|
-
|
DEVICE BBS/DTC Diese Meldung wird vom Motorsteuergerät an das Cockpit übertragen und weist darauf hin, dass das BBS nicht vom Netz erkannt wird oder nicht mit ihm in Kommunikation steht. Das DDS kann folgende Hinweise zur „BBS/DTC working diagnosis” anzeigen: BBS/DTC counter, BBS/DTC no frame
|
|
-
|
Device SW compatibility error-UNKNOWN DEVICE Das BBS ist nicht in der Lage, das Netz mit dem es verbunden ist, zu erfassen.
|
|
7
|
|
-
|
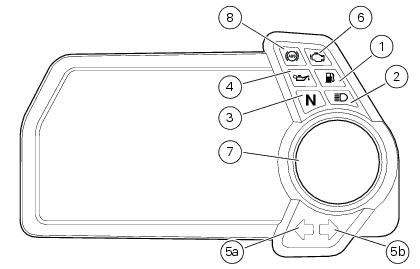
Die Stufen 1 - 2 ermöglichen einen höheren Spin am Hinterrads (die DTC wirkt beschränkt auf den Motordrehmoment) ein. Sie werden für den Einsatz des Motorrads auf Schotterstraßen verwendet. Enduro-Stil
|
|
-
|
Die Stufe 8 hingegen, sorgt für eine erhebliche Reduzierung des Spins am Hinterrad (die DTC wirkt im erheblichen Ausmaß auf die Motordrehzahl ein). Sie wird bei nasser Fahrbahn verwendet. Fahrten bei Regen
|

|
-
|
|
-
|
|
-
|
|
|
||||||
|
|
||||||
|
|
||||||
|
|
||||||
|
-
|
Im Vergleich zur an den SBK-Modellen eingesetzten Lichtmaschinen resultiert die in jeder Phase, bei jeder Rotorumdrehung, erzeugte Frequenz der Sinusspannung höher. Aus diesem Grund wird die an der Multistrada 1200 verwendete Lichtmaschine mit „high - frequency” bezeichnet. Diese Eigenschaft ermöglicht:
|
|
-
|
Im niedrigen Drehzahlbereich, die Abgabe einer beachtlichen Stromstärke. Die elektrischen Vorrichtungen können also versorgt und die Batterie bereits im niedrigen Drehzahlbereich nachgeladen werden.
|
|
-
|
In den hohen Drehzahlbereichen eine maßvollere Stromstärke. Aus diesem Grund wird auch der Spannungsregler nicht belastet, der für den Abbau der nicht von den einzelnen Verbrauchern aufgenommenen Energie zuständig ist.
|
|
-
|
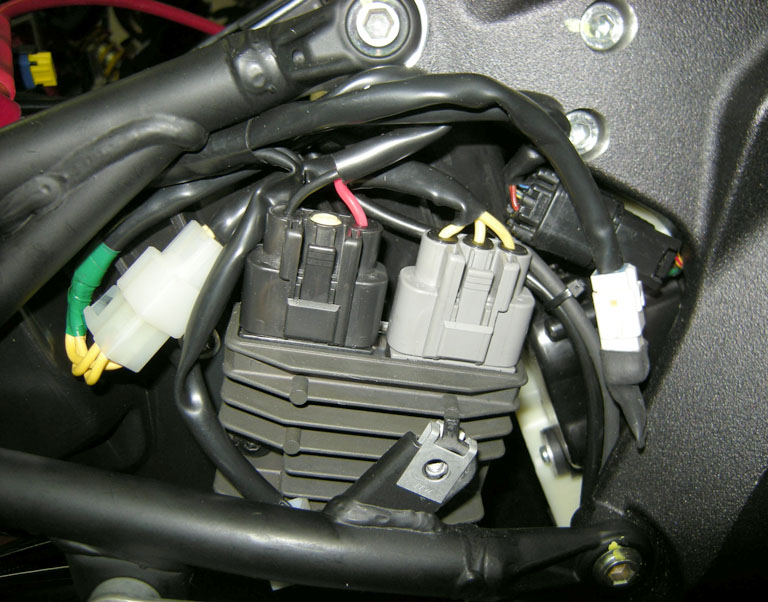
Die Integrität des Schaltkreises über den die Lichtmaschine mit dem Spannungsregler der Batterie verbunden ist (für diesen Test müssen die Batteriekabel abgeklemmt und die elektrischen Anschlüsse auf ihre Unversehrtheit hin geprüft und kontrolliert werden, ob Kurzschlüsse vorliegen). Ebenso muss der Masseanschluss des elektrischen Systems am Motor überprüft werden.
|
|
-
|
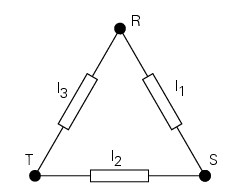
Die zwischen T - R, T - S und R - S anliegende Wechselspannung der Nachladung bei vom Spannungsregler gelöster Lichtmaschine („Leerbetrieb“) und einem Drehzahlbereich von 2500 U/min muss einen Wert zwischen 40 V und 50 V aufweisen. Achtung! Diese Messung muss an einem kalten Motor erfolgen und die Lichtmaschine darf absolut nur bei ausgeschaltetem Cockpit (KEY OFF) vom Spannungsregler getrennt werden. Resultiert der Spannungswert als nicht korrekt, muss die Lichtmaschine ausgewechselt werden.
|
|
-
|
Die Isolierung zur Masse jeder der drei Anschlüsse (der Widerstand von R gegen Masse, von T gegen Masse und von S gegen Masse muss unendlich sein). Sollte keine Isolierung gegeben sein, müssen die Lichtmaschinenwicklungen ausgewechselt werden.
|
|
-
|
Vor einer Überprüfung des Wirkungsgrads des Spannungsreglers muss zunächst der Ladezustand der Batterie geprüft werden. Dieser kann dann als perfekt angesehen werden, wenn die an den Batteriepolen gemessenen Spannung zwischen 12,2 V und 12,7 V liegt. Für diese Messung muss die Batterie von der elektrischen Anlage des Motorrads abgeklemmt werden. Nach erneutem Anschluss der Batterie an die elektrische Anlage des Motorrads muss der Motor gestartet und in einem Drehzahlbereich von 3000 U/min gehalten werden. Unter dieser Bedingung muss die an den Batteriepolen gemessene Spannung zwischen 14 V und 15 V resultieren. Resultiert die Batteriespannung dabei als nicht korrekt, muss der Spannungsregler ausgewechselt werden.
|